
There is a paper on PBMin

| AIRVL Research Projects: Mini-Robots |
|
|
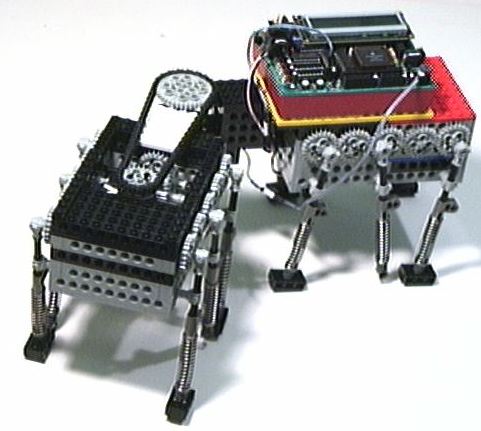
Loon is a multi-robot system designed for navigation and exploration tasks. It makes use of sonars and close-range infra-red sensors to navigate around obstacles. The smaller robot rides on the back of the larger one until it is time for the two to separate and complete separate tasks. |
|
|
PBMin is a Pole Balancing Mini-robot.
It utilizes a 36 node neural net that learns to balance a pole. The pole is attached to a variable resistor to sense pole angle and two infrared sensors to
measure cart position.
There is a paper on PBMin |
|
|
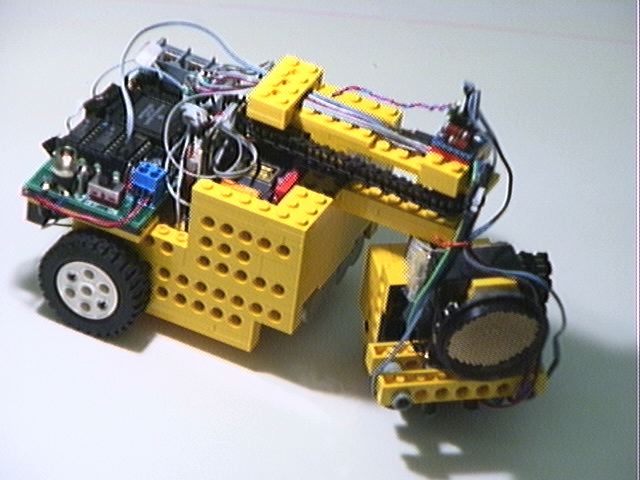
TBMin stands for Trailer Backing Mini-robot. It uses a 64 node neural network that learns to backup a car-trailer vehicle toward a light source. A servo head on the trailer tracks the light source and provides an angle to the target. Trailer angle is measured using a variable resistor on the hitch. Success is determined by both an impact on the trailer bumper and the servo head pointing straight back (within a 5 degree delta). |
|
|
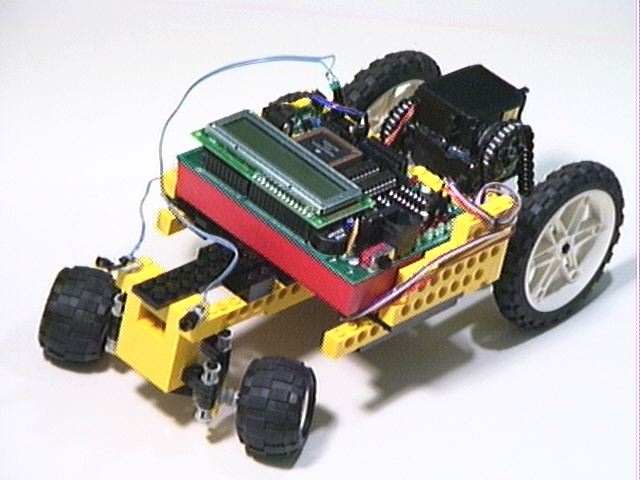
TBMin 2 is the second generation trailer-backer robot. It's constructed out of LEGOs and uses only one Handyboard to control everything. |
|
|
Here is TBMin 2 wearing its second trailer. The natural extension to this research is to see if we can have the robot back up 2 trailers. This involves extending the neural network into three dimensions. |
|
|
Walleye looks for styrofoam cups and empty cans, picks them up, and delivers them to either a trash or a recycling bin. Walleye uses a small black and white camera (160 by 160 pixels) to recognize trash and trash bins. Walleye has competed in the IJCAI/AAAI 1995 Robot Competition where it has obtained the third place in the Pick up trash event. |
|
|
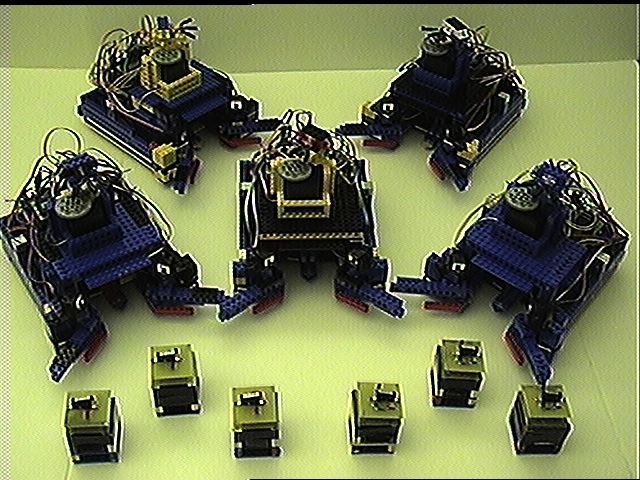
MinDART, the Minnesota Distributed Autonomous Robotic Team, represents current research in cooperative mobile robotics, where robots locate, collect, and return targets to a home base. |
|
|
Surfbot is a three-wheeled trikebot platform which uses a polaroid sonar system to navigate by a modified potential-field navigation scheme. This robot also uses infra-red receivers mounted under the nose to run a line-following demonstration. |
|
|
Photovore is an example of a Braitenberg vehicle where the two CdS photoresistors at the front control the two rear wheels. The greater the amount of light received from one cell, the faster the corresponding wheel will turn. |
|
|
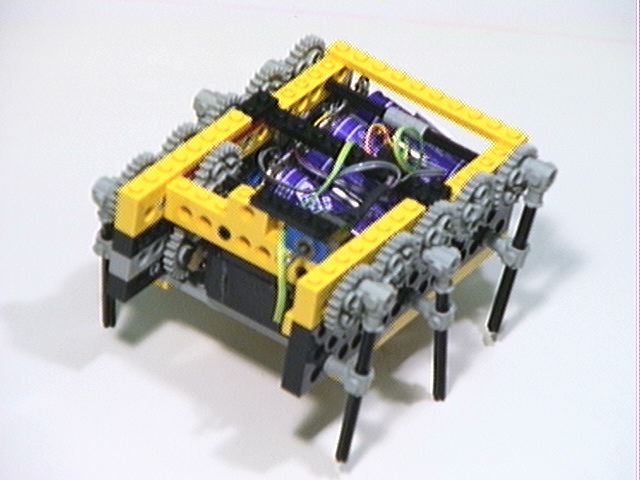
6-leg walker is a simple LEGO robot designed to demonstrate a very simple dual-tripod gait. |
|
|
12-leg walker is made up of two 6 leg walker chassis connected by a universal joint and driven by the same engine. By rotating the connection between the two, the robot is able to turn and navigate. |